
Nieuw dashboard Xanthiona
Op ons motorjacht Xanthiona zijn er 2 stuurposities. De hoofdstuurpositie is op de flying bridge met een uitgebreide set van instrumenten, schermen en het motorpaneel. Vanaf de flying bridge is er het beste overzicht over het jacht om bijvoorbeeld de haven en/of sluizen in of uit te varen en bij krappe situaties alles rondom het jacht in de gaten te houden. In de keuken is een (nood)stuurpositie met kleinere schermen en minder instrumenten. Er is hier bijvoorbeeld geen bediening voor de boeg- en hekschroef opgenomen om je te dwingen vanaf de flying bridge deze te bedienen. Bij slecht weer of op lange rechte stukken kun je vanaf de stuurpositie in de keuken ook prima sturen, maar tot nu toe was er geen motorpaneel en had je dus geen idee van de status van de motor tijdens het varen.
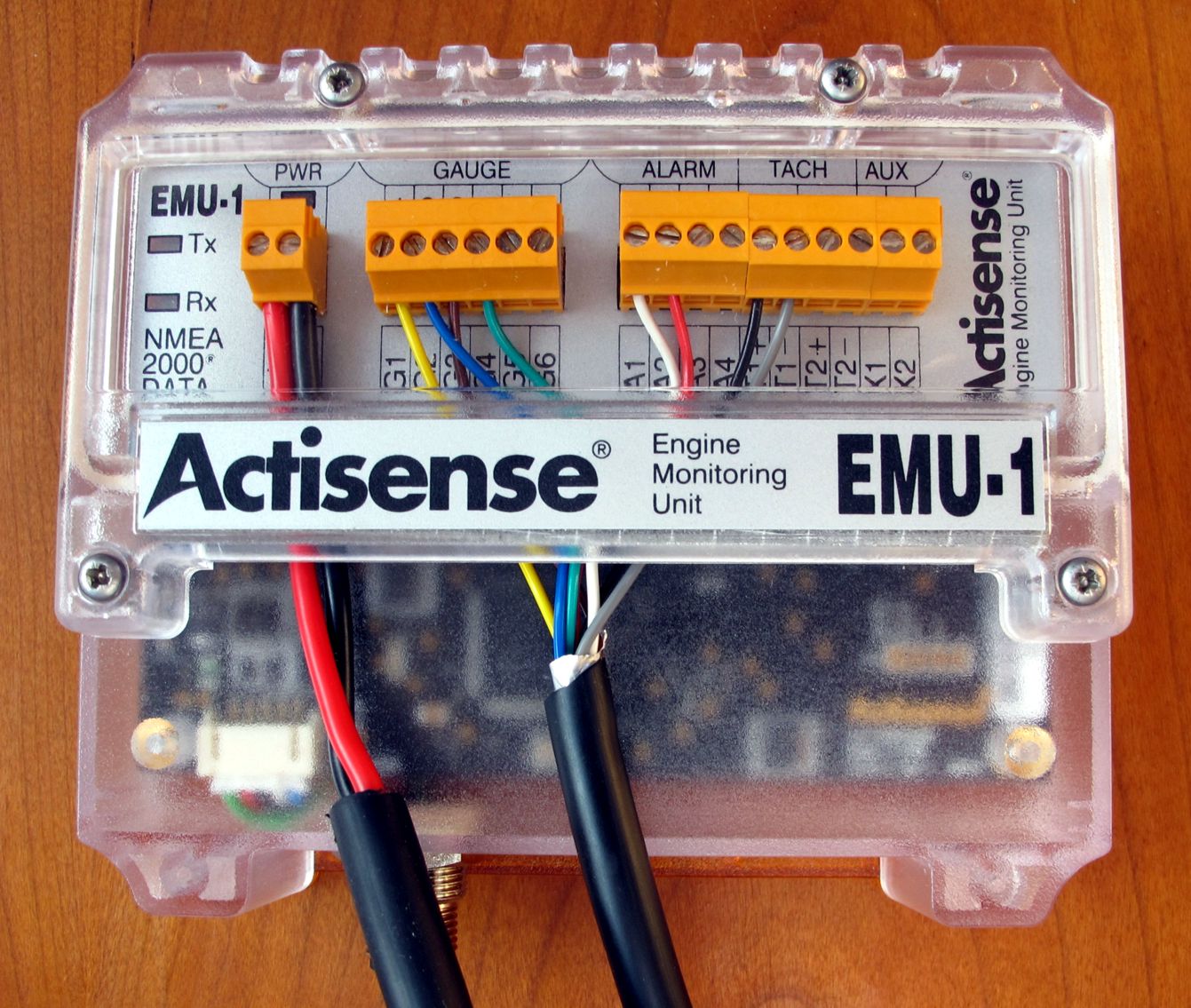
Actisense EMU-1 zet analoge motorsignalen om naar NMEA2000
Een tijd geleden had ik een Actisense EMU-1 module gekocht die de analoge signalen van de motor omzet naar digitaal en publicieert op het NMEA2000 netwerk. Echter ik moest nog wel op zoek naar die analoge signalen. Bij de motor waren drie niet zo goed leesbare elektrische schema’s geleverd en die heb ik diverse malen bestudeerd voordat ik er uit kon halen dat Ly staat voor een kabelje met een Lapis kleur en een dunne yellow (gele) streep. En via het internet kwam ik er achter dat Lapis een blauw-paarse kleur is. Nu de kleurcodes van de kabelboom duidelijk werden was het een kwestie van een 8-aderige kabel solderen aan de diverse kabeltjes van de toerenteller, koelwatertemperatuurmeter, motoroliedrukmeter, oliedrukmeter van de keerkoppeling, koelwatertemperatuuralarm, motoroliedrukalarm, keerkoppelingoliedrukalarm en het niet-laden alarm.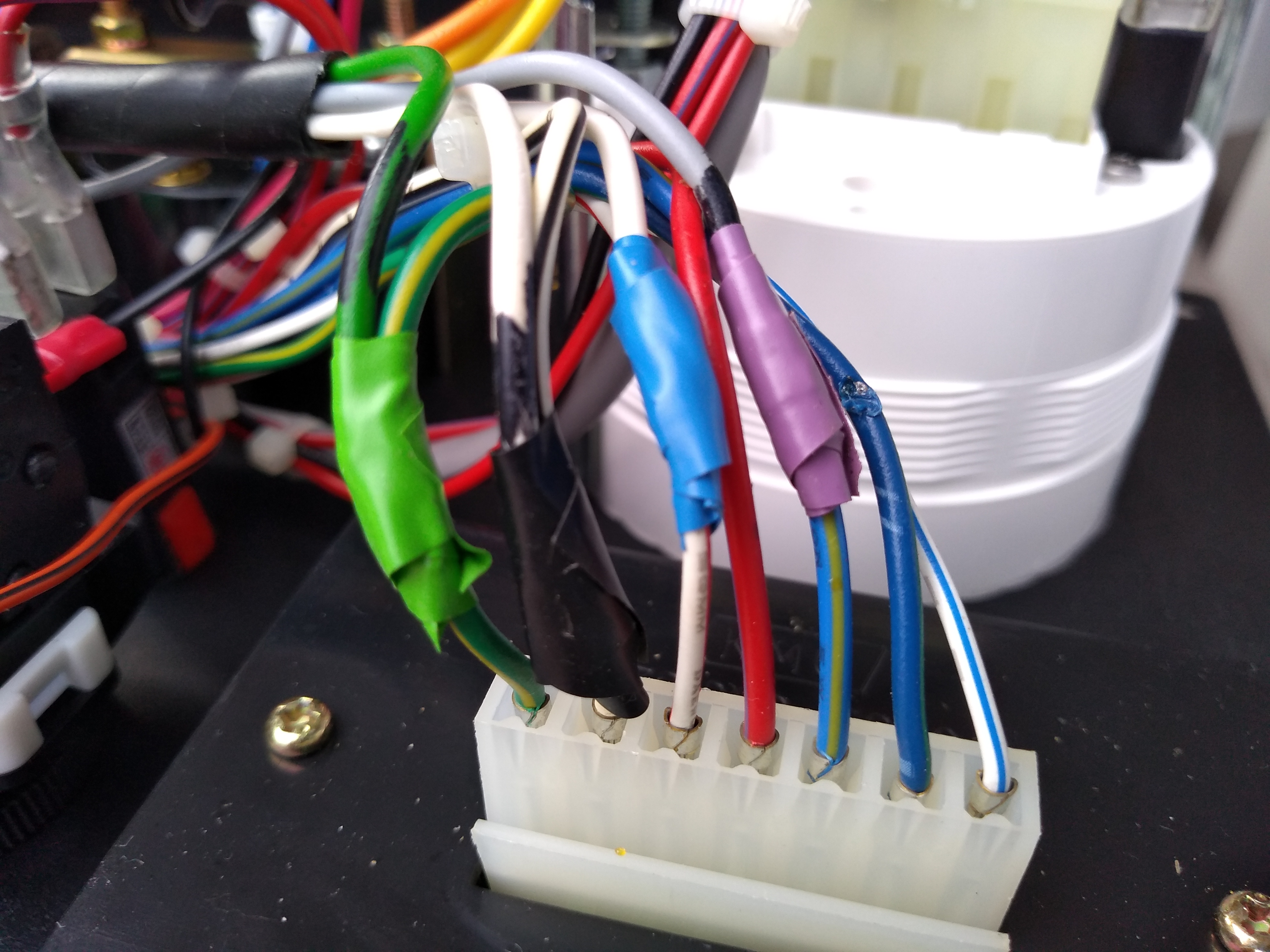
Na het doorvoeren en aansluiten van de kabel naar de op het keukenpaneel gemonteerde Actisense EMU-1, begon het uitzoeken hoe nu de 8 signalen in de juiste vorm op een scherm te krijgen.
Eerst moest de Actisense Toolkit software worden gedownload en geinstalleerd, waarmee de EMU-1 wordt geconfigureerd. De EMU-1 heeft 6 uitgaande signalen voor het weergeven van digitale meters, 4 uitgaande signalen voor alarmen, 2 voor toerentellers en 2 aanvullende uitgangen. Het configureren van de EMU-1 was redelijk vanzelfsprekend, kanalen kiezen, signalen toekennen en NMEA2000 instance kiezen. Vervolgens de ingestelde configuratie naar de EMU-1 sturen. Nu zorgt de EMU-1 er voor dat de analoge motorsignalen worden gedigitaliseerd en worden gepubliceerd op het NMEA2000 netwerk.

Configureren van EMU-1 Actisense Toolkit
De volgende stap was de nu op het NMEA2000 netwerk informatie van de motor tevoorschijn te krijgen. Jaren geleden had ik de Monitoring software van Yachtcontrol gekocht, maar daar nog niks mee gedaan. De Yachtcontrol software was enerzijds bedoeld om eventuele NMEA2000 informatie weer te geven en anderzijds diende het als back-up navigatiesysteem. Met behulp van de digitale kaarten van Navionics biedt de software namelijk ook de mogelijkheid om te navigeren. Normaliter navigeren we op de Xanthiona met PC-Navigo, omdat je daarmee op basis van lengte, breedte, diepgang en hoogte van het schip een vaarbare route kunt plannen. Mocht PC-Navigo niet werken, dan kan de Yachtcontrol software worden gebruikt, echter hiermee kun je geen routes plannen. Mocht de navigatie-PC het niet meer doen, dan kan ik altijd nog met de Simrad kaartplotters navigeren, die gebruiken namelijk ook de Navionics digitale kaarten.


